Nápady a objevy
11. února 2020
Na FIT VUT vyvinuli batoh pro 3D mapování. Využívat ho budou především geodeti
3D modely by nejen čeští geodeti mohli v budoucnu jednoduše vytvářet díky zařízení vyvinutému na Fakultě informačních technologií VUT. Batoh s laserovým skenerem a senzory nasnímá procházenou oblast, software následně vytvoří model. Nyní se odborníci z VUT plánují přesunout k řešení pro auta.
Ve spolupráci s geodetickou firmou Geodrom vyvinuli výzkumníci z Fakulty informačních technologií VUT speciální batoh umožňující 3D mapování. „V době, kdy za námi z firmy přišli, jsme měli základní algoritmy na počítání odometrie. Následně jsme vytvořili hardwarové řešení, algoritmy dovyvinuli a nyní máme prototyp zařízení. Je ještě ve fázi vývoje a dolaďování a nyní putuje mezi fakultou a geodetickou společností,“ popsal Martin Veľas z FIT VUT, který se na projektu podílí.
Batoh vážící okolo osmi kilogramů schovává laserové skenery, GPS a množství senzorů. V budoucnu by si ho měl geodet při mapování konkrétního místa nasadit na záda a oblastí se projít. „Následně přijde do kanceláře, data stáhne, počítač je zpracuje a vytvoří mu 3D model,“ přiblížil Veľas.
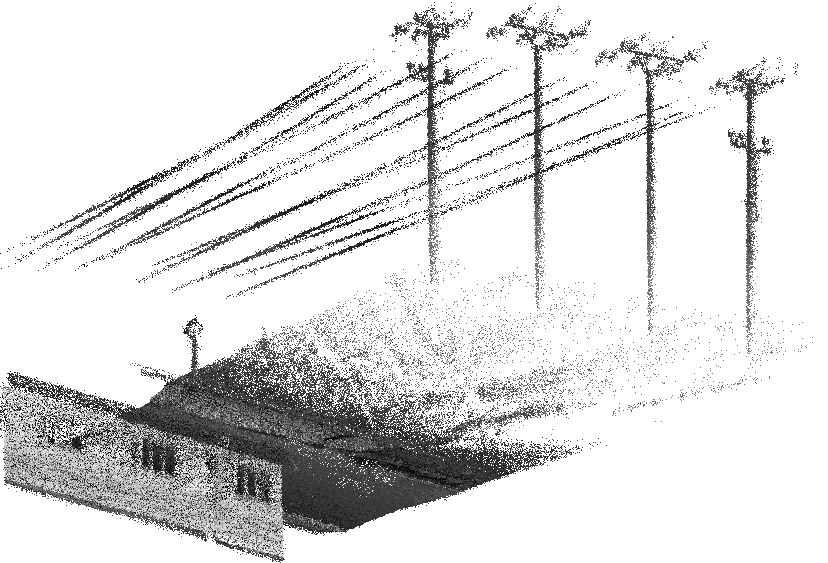
Oproti klasickému zaměřování pomocí totální stanice má batoh řadu výhod. „S totální stanicí jdou některé věci zaměřit jen velmi obtížně nebo zdlouhavě. Například ohyby elektrického vedení, stožáry. Stejně tak bude snazší mapování uvnitř budov,“ potvrdil Matin Veľas. Pro snímání vnitřku objektů využili odborníci z FIT VUT takzvané SLAM metody. Pomocí nich mohou počítat trajektorie i v oblastech bez GPS signálu. „Aby bylo možné vytvořit 3D model, musí mít člověk k dispozici údaje o trajektorii. Venku se obvykle počítají na základě GPS signálu. Uvnitř objektů jsme tento problém vyřešili metodami SLAM,“ dodal Veľas.

Přesnost je pak vevnitř i venku podle Martina Veľase srovnatelná. Zároveň je to ale stále jedna z oblastí, kterou chtějí odborníci vylepšit. „Rádi bychom se dostali na přesnost pět centimetrů. Musíme systém udělat ještě robustnější, aby odolával i ztíženým podmínkám. Například ve stísněných prostorech, dlouhých chodbách, nebo při kolísajícím či slabém signálu GPS,“ uvedl Veľas.
Nyní se odborníci snaží přesunout řešení z batohu na auto, kde je podle Martina Veľase více možností využití. Nabízí se jim také řada dalších technologických řešení a zpřesnění měření. „Kromě toho, že na auto můžeme umístit všechno, co je v batohu, můžeme využít i takzvaný odometer. Ten zjišťuje, jak se otáčí kola, což nám pomáhá ve výpočtu trajektorie. Navíc je na autě plynulejší pohyb, což zlepšuje kvalitu skenování,“ dodal Veľas.
Odborníci si nicméně musí poradit s rychlostí pohybu, protože při jízdě skener mnohdy nestíhá. „Plánujeme proto pořídit skener s větším úhlem záběru. Navíc na autě bude i všesměrová kamera, která bude snímkovat okolí,“ přiblížil plány do budoucna Martin Veľas.
Ačkoliv na světě podobná zařízení již existují, tým z FIT VUT se snaží přinést na trh řešení, které bude cenově dostupnější a univerzálnější v použití. Zájemcům ho hodlají nabídnout jako službu a přidat dodatečný servis navíc.
(zep)
(zep)
Zlatou medaili na MSV získal robot z VUT. Umí najít člověka pod sutinami či lavinou
Vývojáři z Vimperka slaví úspěch s aplikací pro cyklisty Rouvy. Známá alpská passa díky ní mohou jezdit v teple domova
Chytrý autopilot? V začátku vývoje na FIT to bylo něco výjimečného
Vědci z FIT vyvíjejí akcelerační technologie pro vysokorychlostní sítě. Jejich sonda pomáhá i v oblasti zákonných odposlechů
Poznají, kdo na nahrávkách mluví. Jejich aplikace pořizují tajné služby i úvěrové společnosti